


Puff-Particle Model (PPM)
What's the PPM?
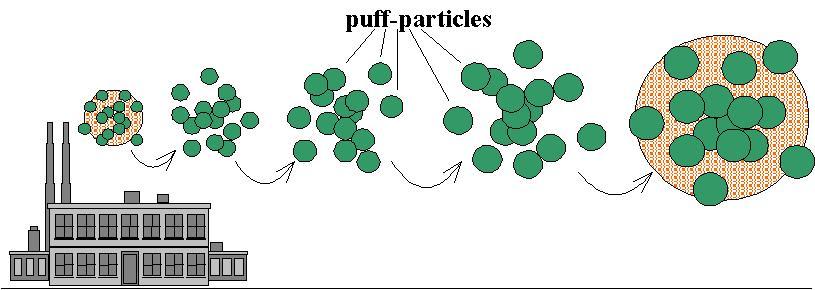
The PPM is a blend between
a Lagrangian Gaussian puff model and a stochastic Lagrangian particle model.
The pollutant puffs are advected by the mean wind; the dispersing effect
of turbulent eddies smaller than the actual size of the puff is described
by a relative dispersion parameterization. Additionally, the puffs exhibit
artificial meandering on time scales shorter than the time interval between
two consecutive updates of the mean wind field.
Absolute and relative dispersion
Commonly, puff models use either
an absolute dispersion parameterization, which accounts for the dispersing
effect of meandering as well. Such puff models provide predictions of the
ensemble mean concentration. Alternatively, puff models may derive an estimate
of the amount of meandering from the statistical properties of the ambient
turbulence. This enables the specification of instantaneous ensemble mean
concentration, together with its variance. In both cases, an instantaneous
release is simulated by one puff. In contrast, in the PPM the puffs experience
a stochastic but realistic meandering. To obtain ensemble statistics, an
ensemble of puffs in the model has to be simulated for each released pollutant
puff. Each simulated puff path is one possible realization of the release’s
dispersion. The main advantage is that all puffs are advected by the local
wind at their current position. Concentration variances can be computed
not only for instantaneous concentrations, but, due to the temporal correlation
between subsequent positions of the meandering puffs, also for any other
sampling time.
Artificial meandering
The puff meandering allows
the PPM to compute the higher moments of concentration, along with the
mean concentration, for any puff release. This provides a convenient way
for risk assessment of hazardous releases, or for the computation of the
frequency of exceedance of a given odor threshold. The particle model embodied
within the PPM assumes that the evolution in time of particle velocity
and position be a Markov process. This neglects the spatial and temporal
correlation between two neighboring particles. To extend the field of application
of the PPM from puff to plume releases, a special puff-plume meandering
scheme has been introduced. It constitutes a dependence of the individual
puffs on their predecessors in the plume.
Avoiding double-counting of dispersion
To ensure that the puff’s meandering
trajectory represents the correct amount of kinetic energy, the PPM computes
a full three-dimensional particle trajectory, as supplied by a stochastic
Lagrangian particle model. Such particle trajectories represent the entire
spectrum of turbulent energy. A low-pass filter is thus applied which removes
all eddies smaller than the actual puff size. The resulting time series
of stochastic velocities is used as puff center trajectory. This avoids
that an increasing part (as puff sizes grow) of the dispersion is double-counted
both by the puff center trajectories and by the relative dispersion scheme.
Ensemble-averaged concentration
The PPM can be used to compute
ensemble-averaged concentrations by sampling over many individual puff
trajectory realizations. For three tracer experiments, the PPM predictions
are compared to those of other dispersion models. It is shown that, due
to the built-in full-scale particle model, the PPM has approximately the
same model prediction performance as pure stochastic particle models (which
perform best). In the ensemble-average mode, the PPM is approximately one
order of magnitude faster than pure particle models. This is due to the
use of puffs, which lead to a smoother representation of the concentration
density field.
Further information...
...can be found in Chapters
2 and 3 of my PhD.
Or send me an e-mail: peter@dehaan.ch
Back to: Peter
de Haan's home page. last update: 4 Oct 2000 - PdH